
Space segment
Structur + Mechanismus
Die äußere Struktur setzt sich aus vier Schienen und vier Seitenwänden zusammen, die aus einer Aluminiumlegierung gefertigt werden. Die Aussparungen an den Seitenwänden dienen zur Gewichtseinsparung. Die innere Struktur besteht aus verschiedenen Zwischenebenen die durch Abstandshülsen für jedes Subsystem in die richtige Höhe gebracht werden können.
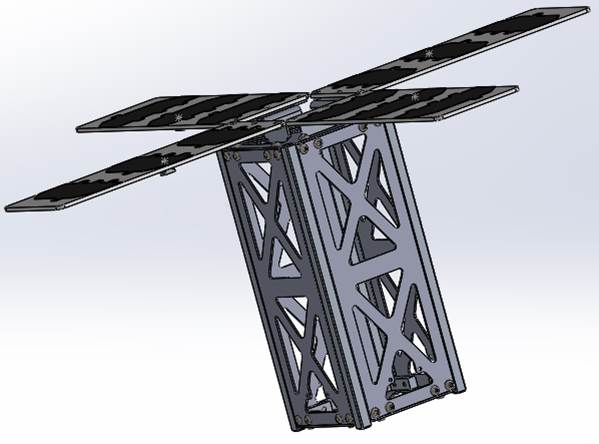
Direkt an der Außenfläche befestigte Solarpaneele können den Energiebedarf des Satelliten nicht abdecken. Deshalb wurde ein Aufklappmechanismus für die Solarpaneele (SADM) inklusive eines Hold Down und Release Mechanismus (HDRM) entwickelt. Der SADM funktioniert über zwei vorgespannte Federn, welche die Solarpaneele beim Auslösen ausklappen. Sobald die Paneele komplett ausgeklappt sind, werden sie an ihrer Enposition fixiert. Der SADM erweitert die effektive zur Sonne ausgerichtete Fläche von 2U auf 8U.
Power Control and Distribution Unit
Das Stromversorgungskonzept des Satelliten ist so ausgelegt, dass auf der Ebene der Subsysteme keine Stromaufbereitung stattfindet. Alle erforderlichen Spannungen müssen von der zentralen Stromsteuerungs- und -verteilungseinheit (PCDU) geregelt werden. Die Primärseite der PCDU ist mit einem Maximum Power Point Tracker verbunden, der den Output der Solarzellen regelt. Innerhalb der PCDU steuert ein Batterieregler das Laden und Entladen der Batterie. Die maximale Kapazität der Batterie ist auf 20Wh bei 12V festgelegt.
Auf ihrer Sekundärseite liefert die PCDU die Spannungen 12V, 5V und 3,3 V als geregelte Stromleitungen. Für die Spannungswandlung wird eine Kombination aus Auf- und Abwärtswandlern verwendet. Jeder Stromoutput wird einzeln durch einen rastenden Strombegrenzer (LCL) hinsichtlich der Spannung und des fließenden Stroms überwacht. Bei Überstrom, Unterspannung oder Überspannung über eine bestimmte Zeit hinaus trennt der LCL die Subsysteme von der Stromversorgung. Die LCLs sind auf jedes angeschlossene Subsystem aufgeteilt.
Die PCDU meldet auf Anfrage interne Housekeeping-Daten an den Bordcomputer (OBC) und reagiert auf Befehle des OBC. Die PCDU ist eine Eigenentwicklung von Studierenden der DHBW.
Datalink
Die Datenverbindung besteht aus zwei separaten Links. Die eine ist für die Steuerung und Übertragung von Housekeeping-Daten, die andere für das Downlink der Nutzlastdaten. Ziel der Mission ist es, sieben Bilder pro Tag von der Nutzlast herunterzuladen. Der Nutzlast-Link erfordert eine sehr hohe Nennkapazität des Kanals. Für den TM/TC Datenlink soll ein Cross-lamenda/2 Dipol dienen.
Für den Downlink der Nutzlastdaten ist ein S-Band-Link mit einer Patch-Array-Antenne auf dem Raumsegment vorgesehen. Mit einer zu entwickelnden 2×2-Patch-Antennengruppe können wiederum fast 12dBi erreicht werden, das sind 4dB mehr im Vergleich zu anderen kommerziell erhältlichen S-Band-Einzel-Patch-Antennen. 2×2-Patch-Antennen für CubeSats sind bisher nur als X-Band Antennen verfügbar.
Die Bodenstation für den UHF Link existiert bereits an der DHBW Ravensburg Campus Friedrichshafen. Die verfügbare Station ist unter dem Rufzeichen DK0TE registriert und unterstützt vollständig die Satellitenverfolgung und Dopplerkorrektur. Die Kommunikation mit anderen CubeSats findet regelmäßig statt.

Für die S-Band-Bodenstationen ist das Konzept eines Netzes von Bodenstationen rund um den Globus vorgesehen. Das Projekt führt Gespräche mit verschiedenen potenziellen Dienstleistern und Partnern. Als Alternative wird die Aufrüstung der Station in Friedrichshafen zur Unterstützung der S-Band-Verbindung analysiert. Es wurde ein statisches Downlink-Budget von -122dBm für das S-Band und -121dBm für den UHF-Link berechnet.
Attitude determination and control system
Das Lagebestimmungs- und -kontrollsystem (ADCS) ist für die Erfassung von Positions- und Lagedaten durch verschiedene Sensoren und die Steuerung der Lage durch Aktuatoren zuständig. Das ADCS muss in verschiedenen Modi arbeiten. Die Aufgaben des ADCS reichen von der Abtrennung von der Trägerrakete bis zur Ausrichtung auf einen bestimmten Punkt auf der Erde. Für den ordnungsgemäßen Betrieb des Bildgebers ist eine Ausrichtungsgenauigkeit des Satelliten von mehr als einem Grad erforderlich. Außerdem muss das ADCS sicherstellen, dass keine der Optiken während der gesamten Lebensdauer des Satelliten der Sonne zugewandt ist.
Die Lageinformationen werden mit Magnetometern, Gyroskopen entlang aller drei Achsen und einem Miniatur-Sternsucher erfasst. Zur Bestimmung der Position wird ein GNSS-Empfänger (Global Navigation Satellite System) an Bord sein. Die Lage des Satelliten wird mit Magnetorquern und kleinen Reaktionsrädern entlang aller drei Achsen des Satelliten gesteuert. Als passiver Beitrag zur Stabilisierung des Satelliten soll der Gravitationsgradient genutzt werden. Dazu wird das Trägheitsmoment durch entsprechende Anordnung der Subsysteme getrimmt. Der Satellit wird sich selbst so ausrichten, dass die Achse des minimalen Moments zur Erdoberfläche zeigt, ohne dass einer der Aktuatoren aktiv ist.
On Board Software Architecture
Im Gegensatz zur üblichen Entwicklung von Satellitensoftware wird SeeSat einen untypischen Ansatz der höheren Abstraktion verfolgen. Dieser basiert auf dem modernsten Software-Architekturprinzip, das in herkömmlichen Softwareprodukten zu finden ist. Um diese Abstraktion zusammen mit einem kommerziellen Echtzeitbetriebssystem (RTOS) wie µC/OS zu erreichen, werden zwei Schichten implementiert, um die Portabilität zu verbessern. Die erste Schicht wird das Echtzeit-Betriebssystem abstrahieren, das auf dem Bordcomputer läuft. Diese Betriebssystem-Abstraktionsschicht (Operating System Abstraction Layer, OSAL) wird von der zweiten Schicht überlagert, die die Anwendungssoftware entkoppeln wird. Die Kommunikation innerhalb des Softwaresystems wird nachrichtenbasiert sein und von der Middleware abgewickelt. Dieser Software-Rahmen ist bereits in Form der API der Middleware definiert. Als Referenz für die Middleware wurde der Standard für Avionik-Anwendungssoftware ARINC 653 verwendet.